



Когда прыгающие гекконы врезаются головой вперед в вертикальные поверхности, такие как стволы деревьев, они могут висеть на этой поверхности, а не отскакивать и падать на землю. Ученые обнаружили, что позволяет им это делать, и скопировали эту способность на небольшом роботе.
Новое исследование возглавили профессор Роберт Фул из Калифорнийского университета в Беркли, доктор Ардиан Юсуфи из Немецкой школы исследований интеллектуальных систем Общества Макса Планка, доктор Роберт Сиддалл из Британского университета Суррея и доктор Грегори Бирнс из Сиенского колледжа в Нью-Йорке.
В течение нескольких полевых сезонов в в лесах Сингапура Юсуфи снял и проанализировал многочисленные замедленные видео, на которых азиатские домовые гекконы (Hemidactylus platyurus) прыгают/планируют от ствола к стволу дерева. Хотя животные пытались избежать неудобных приземлений головой вперед, когда они в конечном итоге это всё-таки приземлялись, они двигались со скоростью около 6 метров в секунду, или 21 километр в час, или около 120 длин тела геккона в секунду.

Азиатский домовой геккон, Hemidactylus platyurus. Видео с этими гекконами, показали, что их хвосты позволяют им эффективно удерживаваться после жестких аварийных приземлений на стволы деревьев, с сильными ударами при столкновении. Фото: Ardian Jusufi
В то время как их голова, плечи и передние лапки отскакивали от дерева, ящерицы могли схватить ствол своими цепкими задними лапками. Это давало им возможность прижать свой длинный хвост к дереву, позволяя придатку действовать как скоба, которая не позволяла им перевернуться назад и упасть на дно джунглей. Этот фиксирующий механизм был воспроизведен в напечатанном на современном 3D-принтере Carbon M2, роботе, созданном учеными.
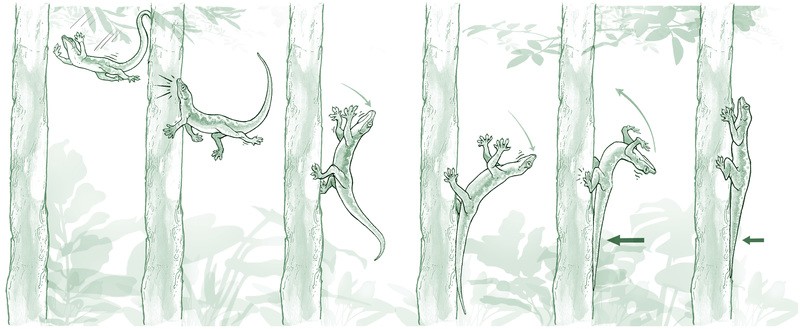
Иллюстрация техники приземления геккона. Фото: Felipe Vargas
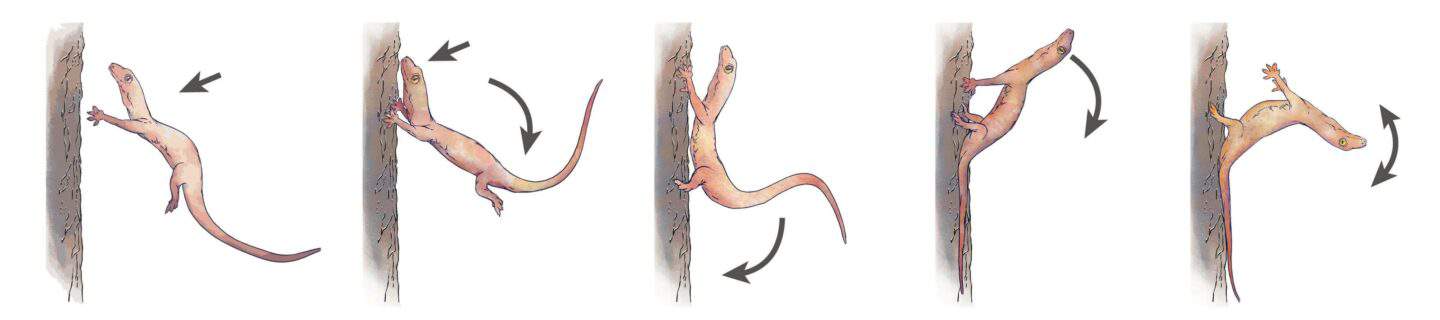
Последовательность изображений реакции, останавливающей падение. Фото: Andre Wee.
Исследователи смоделировали поведение математически, чтобы подтвердить, что то, что они видели, имело физический смысл. Но чтобы действительно определить, что испытывают гекконы, они решили впоследствии построить мягкого робота, который напоминает геккона, и запускать его с катапульты в стену. Таким образом, они могли измерить силы, которые на самом деле испытывали гекконы при приземлении, и силы сцепления, создаваемые лапками.
Понятно, что роботы-гекконы не могли прыгать и парить, как настоящие гекконы, так как же исследователям удалось решить эту проблему? Устройство робота имело четыре покрытые текстильной липучкой Velcro лапки, хвост и внутреннее моторизованное сухожилие, которое автоматически приводилось в действие, чтобы прижимать хвост вниз всякий раз, когда передние лапки плотно касались поверхности. И они изобрели катапульту, чтобы запускать роботов в стены.
Когда этого робота катапультировали на покрытую войлоком стену, он мог цепляться, не падая назад в 55% случаев. Хотя это может показаться не фантастическим, его успешность упала до 15 процентов, когда ему удалили хвост. Это согласуется с тем, что наблюдалось у диких гекконов: хвостатые особи имели 87 процентов успеха, но те, которые естественным образом потеряли хвост из-за хищников или в результате других несчастных случаев, были почти полностью неудачными.

Ардиан Юсуфи (слева) и Роберт Сиддалл (справа) с роботом, вдохновленным гекконами, в лаборатории локомоции в биороботических и соматических системах, в Штутгарте. Фото: Wolfram Scheible
«С помощью робота мы смогли измерить то, чего не могли измерить с помощью гекконов в полевых условиях», - говорит Юсуфи. «Силы возникающие при ударе при приземлении на стену подтвердили, что хвост является важной частью, облегчающей приземление в докритических глиссадах. Наш мягкий роботизированный посадочный модуль не только помогает добиться успеха в других сферах, но также может помочь улучшить передвижение роботов за счет повышения надежности и упрощения управления».
Джусуфи и Фулл отмечают, что структуры, похожие на хвосты геккона, можно использовать для стабилизации летающих роботов, таких как дроны, когда они приземляются на вертикальные поверхности.
Статья об исследовании была недавно опубликована в журнале Communications Biology. Робота можно увидеть в действии на следующем видео.
Источник: New Atlas / University of California-Berkeley, Max Planck Research School for Intelligent Systems via EurekAlert







