



За прошедшие годы все чаще роботы используются для автономной очистки полов и других поверхностей в таких местах с сложным пространством, как аэропорты и больницы. Однако вы должны задаться вопросом… как они узнают, что пол достаточно чистый? Скоро им об этом скажет новый модуль.
Один из способов определить чистоту поверхности - это прикосновение и визуальный осмотр. Устройство, которое в настоящее время разрабатывается Сингапурским университетом технологий и дизайна, включает в себя рулон белой клейкой ленты, шаговый двигатель, который вытягивает короткие отрезки этой ленты, моторизованный подпружиненный «поршень», который давит на вытянутую ленту, и USB-камера для визуального изучения ленты.
Робот, использующий устройство, начинает с изображения отрезка ленты в ее чистом, неиспользованном состоянии. Затем этот же участок ленты прижимают к полу (липкой стороной вниз), а затем снова исследуют через камеру. Подсчитав количество пикселей, в которых теперь видны частицы грязи (но которых раньше не было), робот может присвоить «оценку грязи» этой области пола.
Затем бот может очищать и повторно оценивать эту область до тех пор, пока ее оценка не станет удовлетворительной - шкала оценок варьируется от 0 до 100, где 0 - самая грязная, а 100 - самая чистая.
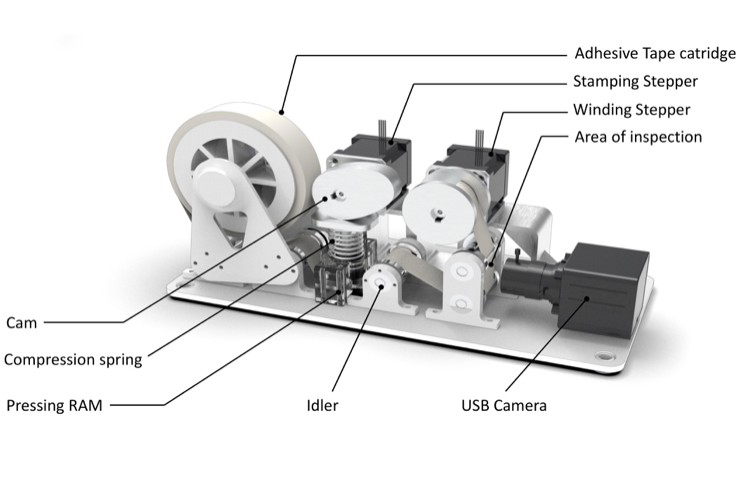
Схема модуля. Фото: Singapore University of Technology and Design
Однако есть некоторые ограничения, которые все еще необходимо устранить. Во-первых, полы с грубой текстурой, как правило, задерживают частицы грязи, не позволяя им прилипать к ленте. Система также может ошибочно обнаруживать грязь при переходе между участками пола с разной текстурой.
В будущем есть надежда, что модуль дополнительно сможет оценивать микробную плотность, чтобы робот знал, нужно ли стерилизовать пол. Ученые также разрабатывают алгоритмы, которые позволят роботам-уборщикам визуально определять, какие участки пола могут быть самыми грязными, чтобы им было уделено больше всего внимания.
Статья об исследовании недавно была опубликована в журнале Sensors.
Источник: Singapore University of Technology and Design via EurekAlert







