



Несмотря на то, что у них нет гибких языков, сомы все же могут вращать захваченную добычу во рту. Новое понимание того, как они могут это делать, в конечном итоге может привести к более ловким подводным роботам или другим технологическим достижениям.
Команда из Университета Брауна в Род-Айленде под руководством научного сотрудника Аарона М. Олсена начала снимать пойманных канальных сомиков (лат. Ictalurus punctatus), когда они ловили и глотали добычу. Ученые использовали технику захвата движения, известную как реконструкция движущейся морфологии с помощью рентгеновских лучей, которая позволила им фактически заглянуть внутрь черепов животных, когда они ели.
В то время как у людей есть только одна подвижная челюстная кость, было замечено, что у сома их более дюжины. Эти жесткие кости соединены друг с другом гибкими суставами или звеньями. Таким образом, череп канального сомика функционирует как 17-звенный механизм, который может перемещать воду (и добычу) во рту с помощью таких действий, как открывание передней части рта, расширение горла по вертикали, расширение середины рта по горизонтали и расширение жабр либо вверх, либо наружу.
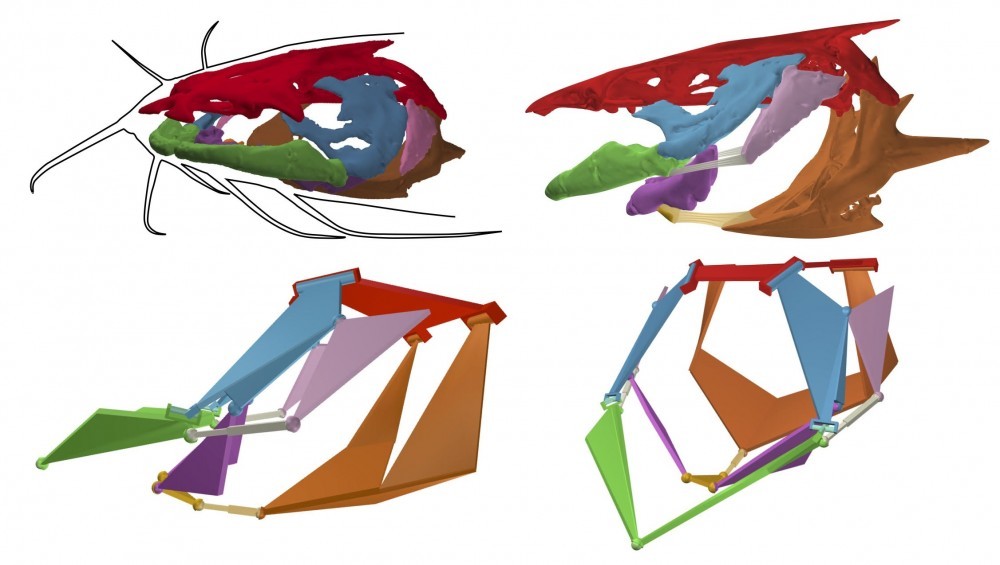
Кости черепа канального сомика (вверху) и соответствующий 17-звенный механизм (внизу). Фото: Society for Integrative and Comparative Biology
В зависимости от того, какое из этих действий используется, вода может вытягиваться из передней части рта в заднюю часть, втягивая добычу; ее можно выталкивать из задней части рта вперед, продвигая добычу вперед; и она может быть сформирована в «волну сжатия», вероятно, используемую для более точного позиционирования добычи.
По большей части рыба придерживается семи основных движений. Олсен отмечает, что в то время как люди используют такое же количество движений рук, чтобы дотянуться до объектов и схватить их, подводные роботы, похожие на рыбий рот, могут делать то, чего не могут механические руки.
«У подводных автономных транспортных средств может быть роботизированная рука, такая как наша собственная рука, которая хорошо работает для манипулирования более тяжелыми предметами, но не может захватить или может раздавить плавающий предмет», - говорит он. «И у них может быть всасывающее устройство, которое может всасывать или выдувать плавающие предметы, но не может их перемещать и вращать с высокой точностью. Создание чего-то более близкого по структуре к рту рыбы может иметь преимущество».
Статья об исследовании была недавно опубликована в журнале Integrative Organismal Biology.
Источник: Society for Integrative and Comparative Biology via Newswise







