



У пластиковых бутылок с кетчупом есть клапан в крышке, который открывается, чтобы выпустить кетчуп, и который иногда «брызжет», если бутылку сжать слишком сильно. Голландские ученые скопировали этот механизм для создания актуатора, который можно было бы использовать в автономных мягких роботизированных устройствах.
Устройство, разработанное командой Эйндховенского технологического университета, известно как «гистерезисный клапан». Оно имитирует тенденцию клапанов бутылок с кетчупом быстро и многократно открываться и закрываться (каждый раз выпуская немного кетчупа), даже когда бутылка сжимается плавно и равномерно.
Такой отклик может показаться нежелательным — и это так, в бутылках с кетчупом. В роботе, однако, идея состоит в том, что если воздух будет накачиваться через такой клапан в мягкую пневматическую ногу или палец, распыляющее действие заставит придаток неоднократно расширяться и сужаться, двигаясь при этом вперед и назад.
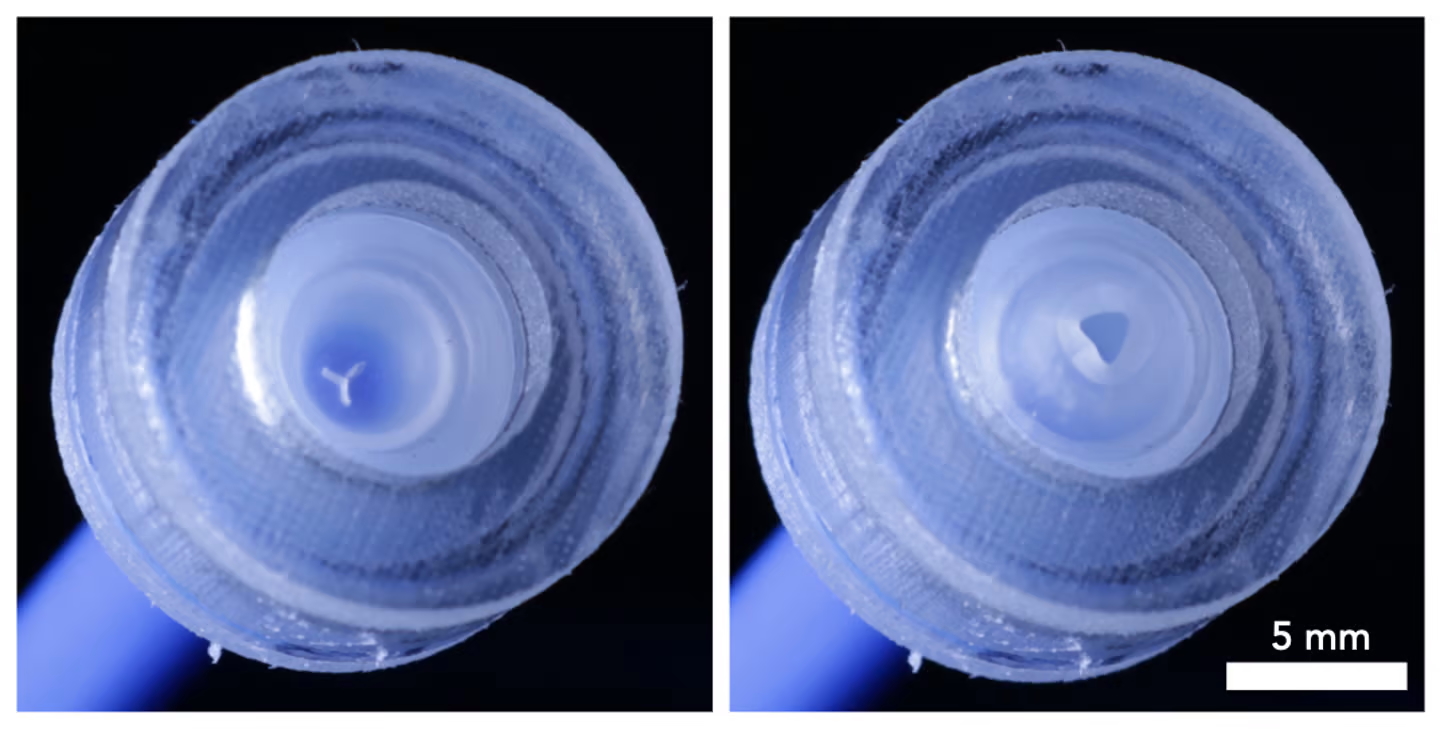
Присмотритесь к гистерезисному клапану, закрытому (слева) и открытому (справа). Фото: Eindhoven University of Technology.
Более того, движение будет инициироваться простым аналоговым механизмом, а не более сложной и энергоемкой электроникой. Возможно даже, что воздушный насос может запускаться изменением окружающей среды робота, что устраняет необходимость во внешнем управлении.
Проще говоря, гистерезисный клапан состоит из плоской силиконовой основы с прорезями, вырезанными в ней лазером. Створки, образованные щелями, остаются закрытыми до тех пор, пока давление воздуха за ними не достигнет определенного порога, после чего они открываются и выпускают воздух. Затем они снова закрываются, и цикл повторяется снова и снова.
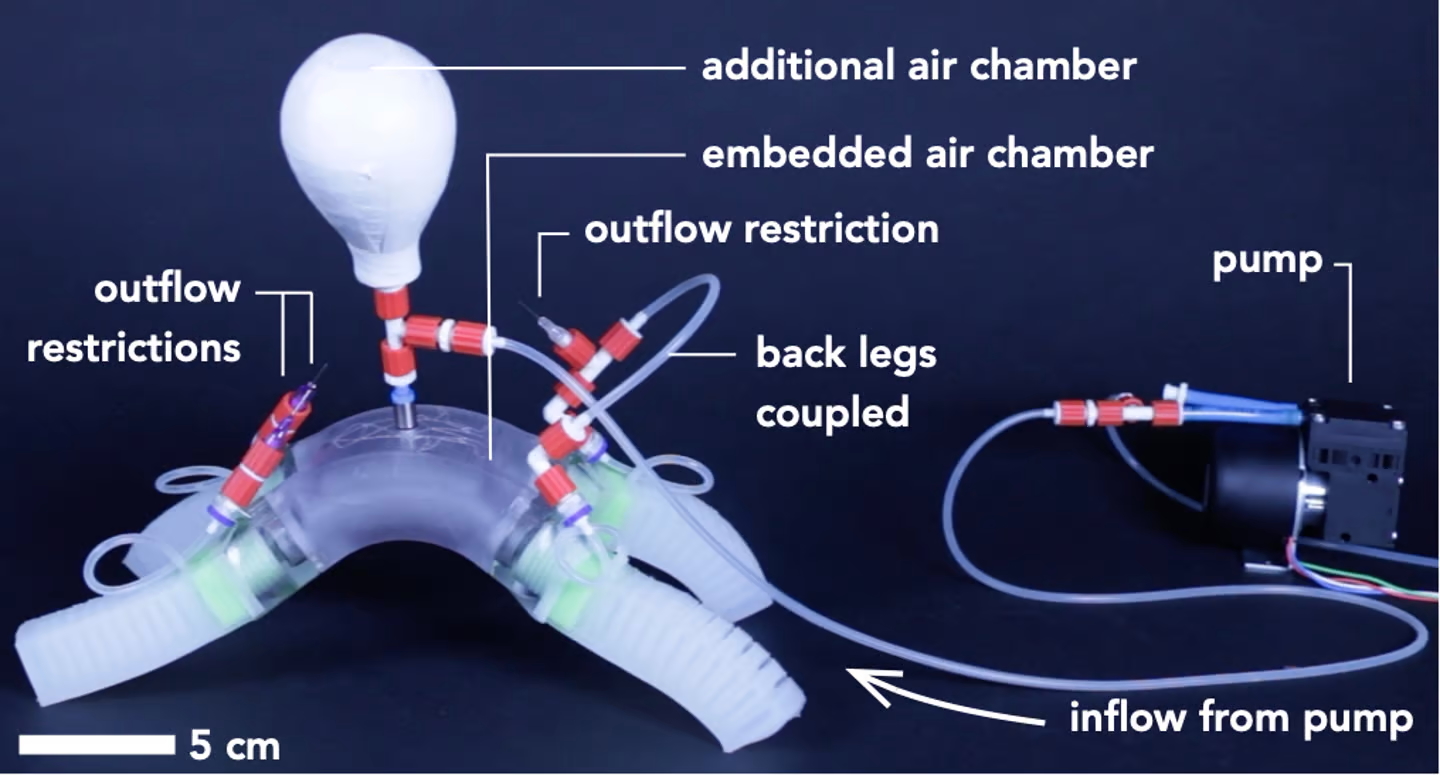
Схема четвероногого робота с гистерезисными клапанами. Фото: Eindhoven University of Technology.
Неожиданно было обнаружено, что когда два клапана подключены к одному насосу, они имеют тенденцию открываться и закрываться не в ногу друг с другом (не синхронно) — другими словами, один клапан открывается, когда другой закрывается. Используя этот эффект, исследователи создали робота с мягким телом, который ходит с помощью четырех поочередно переступающих ног. Они также создали роботизированную руку, которая последовательно барабанит своими пневматическими пальцами.
Статья об исследовании была опубликована в журнале Matter. Четвероногого робота и роботизированную руку можно увидеть в действии на видео ниже.
Источник: Eindhoven University of Technology







