



Китайские инженеры и ученые разработали робот, который вышел словно прямо из фильмов "Железный человек" (Iron Man). Двуногий бот оснащен небольшими реактивными двигателями, которые прикреплены к его ногам, и он может даже садиться на шпагат, чтобы он не падал, когда пересекает широкие промежутки и щели.
Инженеры робототехники в Школе автоматизации Университета Гуандун в Китае прикрепили два вентилятора к ногам робота, которые позволяют ему пересекать более широкие расстояния, чем это было раньше. Эти инженеры по робототехнике, сделали еще один продвинутый шаг, чтобы реализовать фантастический костюм Тони Старка из фильма «Железный человек».
Двуногий робот может пересекать большие расстояния, благодаря двум небольшим реактивным двигателям. Фото: Guangdong University of Technology.
Он также решает основную проблему, обычно возникающую у разработчиков роботов. Большинство двуногих роботов способны совершать статические движения, например, идти вперед короткими, контролируемыми шагами.
Прогуливаясь по сложной местности или сталкиваясь с каким-то препятствием, которое они должны преодолеть, все становится немного сложнее и иногда опасно. Вот почему многие роботы, как известно, падают, когда им поручают более сложные задачи или движения.
Люди способны поворачивать и изгибать свои тела, чтобы не упасть, в то время как роботы не обладают этой способностью.
Но китайский робот, названный Jet-HR1, вряд ли упадет, потому что реактивные двигатели могут сбалансировать его центр тяжести.
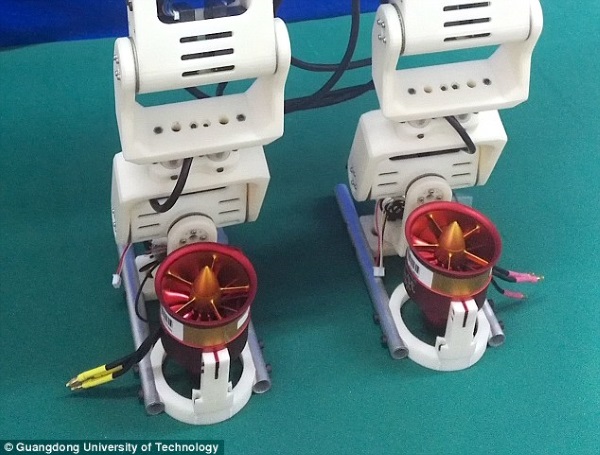
Робот Jet-HR1 оснащен двумя реактивными двигателями, которые привязаны к его ногам и весят всего 232 грамма, при этом вырабатывая до 2 кг тяги. Фото: Guangdong University of Technology.
Высота робота Jet-HR1 составляет всего 65 см, или примерно два фута высотой и весит 6,5 кг.
Согласно данным журнала IEEE Spectrum, издаваемого Институтом инженеров электротехники и электроники, реактивные двигатели робота весят всего 232 грамма, но они могут вырабатывать до 2 кг тяги, что составляет почти треть всего веса всего робота.
Таким образом, хотя Jet-HR1 все ещё не способен летать по воздуху в данный момент, двигатели все еще тем не менее обладают множеством мощностей, которые позволяют ему выполнять еще больше задач еще быстрее.
В видеоролике ниже Jet-HR1 можно увидеть, как робот преодолевает большой пробел, который составляет 37 см в ширину.
Чтобы преодолеть этот пробел, робот должен был завершить шаг, который составлял 80% его ноги, отметили в IEEE Spectrum.
Робот сначала выдвинул ногу, растянув ее до другой стороны, в движении, которое почти похоже на шпагат.
Как только он закрепился ногой на другой стороне зазора, робот затем отталкивает свою другую ногу, что дает ему достаточно силы, чтобы встать почти полностью прямо.
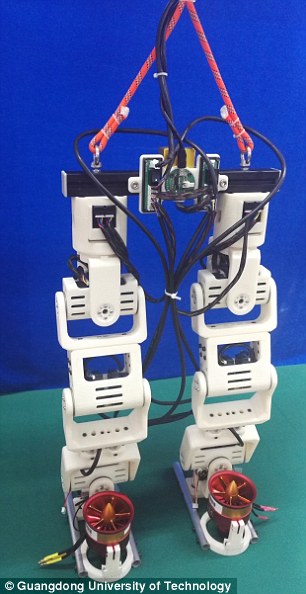
Небольшие вентиляторные реактивные двигатели значительно улучшают балансировку этого робота, но он еще не может летать. Фото: Guangdong University of Technology.
В общем, роботу потребовалось меньше минуты, чтобы сделать этот маневр, что намного быстрее, чем раньше.
Как пишут в издании Gizmodo, без вентиляторов Jet-HR1 мог преодолевать расстояние, которое было равно 3,5 дюйма в ширину.
При помощи реактивных двигателей робот мог бы потенциально пересекать дистанции шириной до 1,5 футов, что составляет примерно 97% от длины ноги робота.
Исследователи полагают, что результаты могут быть применены ко многим роботам, которые сталкиваются с более сложными сценариями, такими как поисково-спасательные миссии.
Это также может привести к более футуристическим приложениям, таким как летающие роботы, работающие на реактивных двигателях - образ, который вдохновил исследователей, участвующих в последнем исследовании.
«Мы были более или менее вдохновлены научной фантастикой», - сказал один из исследователей, участвующих в исследовании, Жифен Хуан (Zhifeng Huang) в интервью IEEE Spectrum.
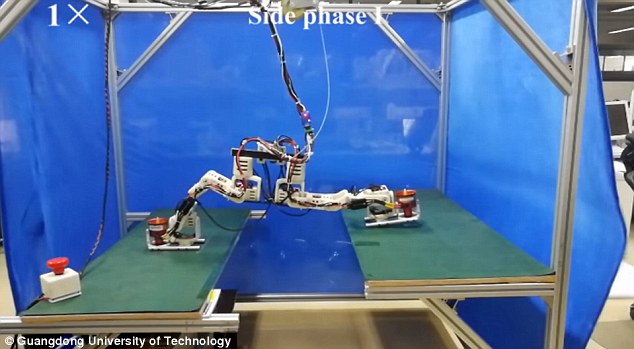
Робот Jet-HR1 пересекает довольно широкий промежуток между двумя поверхностями и ему требуется меньше минуты для такого маневрирования. Фото: Guangdong University of Technology.
«Фактически, мы рассмотрели эту идею два года назад, когда заметили ограничение мобильности гуманоидных роботов при переходе через щебень, обломки, развалины в сценарии после землетрясения».
«... Вот почему мы думаем о новом методе, который позволяет роботу поддерживать квази-статическое равновесие и оказывает менее существенное влияние, когда он преодолевает препятствия».
«И наша идея заключалась в использовании внешней силы струи воздуха для поддержания равновесия робота», - добавил он.
Жифен Хуан отметил, что метод реактивного движения может привести к дальнейшему продвижению в том, как роботы могут прыгать, качаться на одной ноге, выполнять 3D-движения и уменьшать количество столкновений во время «динамического движения».
А вот и видео:
Источник: dailymail.co.uk







