



Хотя роботы с мягким телом очень перспективны для таких задач, как протискивание в ограниченном пространстве, это немного контрпродуктивно, если их мягкие навески перемещаются с помощью жестких приводов. Новая технология решает эту проблему за счет использования «причудливых воздушных шаров».
Во-первых, некоторые группы уже разработали мягкие приводы (и даже мягкие батареи), позволяющие создавать роботов с полностью мягким телом. Тем не менее, для их изготовления обычно требуются дорогие машины, такие как 3D-принтеры или лазерные резаки. В поисках менее дорогой альтернативы ученые из Принстонского университета разработали метод, известный как «пузырьковое литье».
Процесс начинается с того, что жидкий эластомер впрыскивается в форму, которая имеет форму желаемого готового исполнительного механизма. Затем нагнетается воздух, вытесняя часть жидкого эластомера с образованием пузыря, проходящего по всей длине формы. Когда этот пузырь поднимается, над ним остается тонкая пленка эластомера, но большая часть жидкого эластомера оказывается внизу.
Как только эластомер затвердеет до резиноподобной консистенции, привод вынимается из формы. Когда воздух впоследствии нагнетается в полость, образованную пузырем, привод естественным образом изгибается к своему основанию, где эластомер более толстый и, следовательно, менее эластичный.
И хотя основание находится в нижней части привода во время процесса литья, устройство, конечно, можно повернуть на любой угол после его установки в робота. Кроме того, регулируя переменные, такие как толщина пленки над пузырем и время отверждения эластомера, можно диктовать манеру движения исполнительного механизма.
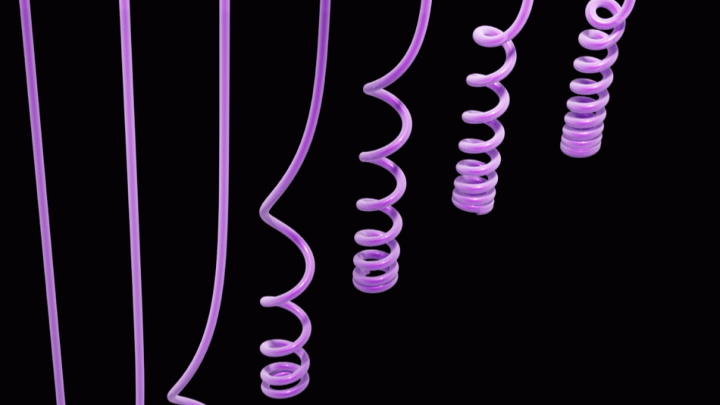
Исследователи создали асимметричную конструкцию, которая изгибается при надувании. Фото: Princeton University
До сих пор, эта технология использовалась для создания различных вещей - небольшой эластомерной спирали, которая при надувании сжимается как мышца, захвата в форме звезды, который может удерживать чернику, не повреждая ее, рыбьего хвоста, который взмахивает туда-сюда, и набор пальцевидных навесок, которые последовательно изгибаются друг за другом. Более того, считается, что эту систему можно использовать для создания приводов длиной от нескольких метров до таких, которые не намного длиннее ширины человеческого волоса.
Тем не менее, есть некоторые проблемы, которые все еще необходимо преодолеть, например, предотвращение лопания устройств при их чрезмерном накачивании.

Исследователи из Принстона использовали пузырьковое литье для создания мягкой робототехники, способной захватывать и поднимать мяч. Фото: Princeton University
Статья была недавно опубликована в журнале Nature.
Источник: Princeton University







