



Когда дело доходит до разработки роботов, которые могут эффективно перемещаться по воде, ученые регулярно обращаются за вдохновением к таким существам, как кальмары и медузы, а британская исследовательская группа только что создала робота, который может плавать с лучшими из них. Мягкий и гибкий робот использует новый метод движения, чтобы двигаться так же, как самый эффективный пловец, встречающийся в природе, и обладает набором характеристик, которые, по словам его создателей, хорошо подходят для работы в хрупких и чувствительных подводных средах.
Робот был создан командой инженеров из Саутгемптонского и Эдинбургского университетов, которые черпали вдохновение у Ушастой аурелии, или ушастой медузы (лат. Aurelia aurita), которую считают самой эффективной пловчихой в природе. Робот имитирует движения этого морского существа с помощью того, что инженеры называют «движущим куполом».
Он состоит из резиновой мембраны, которая обрамляет набор из восьми напечатанных на 3D-принтере гибких ребер с небольшим поршнем, расположенным в верхней части тела робота. Этот поршень пробивает движущий купол, заставляя его расширяться, а затем многократно возвращаться к своей первоначальной форме, создавая струи жидкости, которые продвигают робота через воду.
Это имитирует технику плавания, используемую медузами, и когда в купол ударяют с правильной частотой, робот может плавать со скоростью одна длина тела в секунду, что эквивалентно эффективности ушастой медузы. Это явление известно как резонанс и относится к сильным вибрациям, возникающим в результате приложения силы с правильной частотой, подобно тому, как ребенка толкают на качелях.
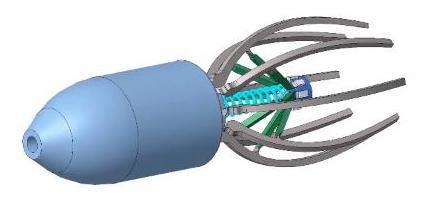
Схема высокоэффективного робота в стиле медуз. Фото: University of Southampton
По словам ученых, это первый раз, когда резонанс был продемонстрирован как форма движения в подводном аппарате, и эта техника позволяет роботу плавать в 10-50 раз эффективнее, чем сопоставимые подводные роботы, приводимые в движение пропеллерами.
«Предыдущие попытки привести в движение подводных роботов с помощью струйных систем заключались в проталкивании воды через жесткую трубку, но мы хотели пойти дальше, поэтому мы внесли эластичность и резонанс в имитацию биологии», - говорит соавтор Тьерри Бужар. «Я был действительно удивлен результатами, я был уверен, что конструкция будет работать, но эффективность робота оказалась намного выше, чем я ожидал».
Поскольку робот имеет мягкий и гибкий внешний вид, ученые считают, что однажды он может оказаться полезным при исследовании хрупкой окружающей среды, такой как коралловые рифы, археологические памятники или районы, часто посещаемые людьми-пловцами. Теперь команда сосредоточит свое внимание на оснащении робота технологиями, необходимыми для такого рода приложений.
«Есть еще много проблем и захватывающих возможностей, которые можно исследовать с помощью мягких подводных робототехнических технологий», - говорит доктор Габриэль Веймут из Саутгемптонского университета. «Теперь мы стремимся расширить концепцию этого робота до полностью маневренного и автономного подводного аппарата, способного распознавать окружающую среду и ориентироваться в ней».
Исследование было опубликовано в журнале Science Robotics, а видео ниже содержит сырые кадры робота в действии.
Источник: New Atlas / University of Southampton via EurekAlert







