«Робот-частица» работает как кластер простых единиц.
Подражая биологическим клеткам, исследователи из Массачусетского технологического института, Колумбийского университета и других стран разработали простых в вычислительном отношении роботов, которые объединяются в большие группы для перемещения, транспортировки объектов и выполнения других задач.
Эта так называемая система «робототехники частиц» - основанная на проекте исследователей Массачусетскогог технологического института, школы инженерных и прикладных наук Колумбийского университета, Корнелльского университета и Гарвардского университета - включает в себя множество отдельных дискообразных блоков, которые исследователи называют «частицами». Частицы слабо связаны магнитами по периметру, и каждая единица может делать только две вещи: расширяться и сжиматься. Каждая частица имеет размер около 15см в сжатом состоянии и около 23см при расширении. Это движение, когда оно тщательно рассчитано, позволяет отдельным частицам толкать и тянуть друг друга в согласованном движении. Бортовые датчики позволяют кластеру притягиваться к источникам света.
В опубликованной статье в журнале Nature исследователи демонстрируют кластер из двух десятков реальных роботизированных частиц и виртуальную симуляцию, в которой до 100 000 частиц движутся сквозь препятствия к светящейся лампочке. Они также показывают, что робот-частица может транспортировать объекты, размещенные в его среде.
Роботы-частицы могут образовывать множество конфигураций и плавно перемещаться вокруг препятствий и проходить сквозь узкие промежутки. Примечательно, что ни одна из частиц не взаимодействует напрямую и не полагается друг на друга, чтобы функционировать, поэтому частицы могут быть добавлены или вычтены без какого-либо воздействия на группу. В своей статье исследователи показывают, что роботизированные системы частиц могут выполнять задачи, даже когда многие устройства работают со сбоями.
Статья формулирует новый способ мышления о роботах, которые традиционно предназначены для одной цели, состоят из множества сложных частей и не перестают работать при неисправности любой части. Исследователи говорят, что роботы, состоящие из этих упрощенных компонентов, могут создавать более масштабируемые, гибкие и надежные системы.

Слабосвязанные дискообразные «частицы» могут толкать и тянуть друг друга, массово перемещаясь к транспортным объектам. Фото: MIT
«У нас есть небольшие роботизированные ячейки, которые не так способны, как и любая отдельные единица, но могут многого добиться в группе», - говорит Даниела Рус (Daniela Rus), профессор, директор Лаборатории компьютерных наук и искусственного интеллекта. «Робот сам по себе статичен, но когда он соединяется с другими частицами робота, то внезапно коллектив роботов может исследовать мир и управлять более сложными действиями. С помощью этих «универсальных ячеек» робот-частица может достигать различных форм, глобального преобразования, глобального движения, глобального поведения и, как мы показали в наших экспериментах, следовать за градиентами света. Это очень круто».
В Массачусетском технологическом институте Даниела Рус работает над модульными, соединенными роботами в течение почти 20 лет, включая расширяющегося и сжимающегося кубического робота, который может соединяться с другими, чтобы передвигаться. Но квадратная форма ограничивала групповые движения и конфигурации роботов.
Но потом исследователи выбрали дискообразные механизмы, которые могут вращаться вокруг друг друга. Они также могут подключаться и отключаться друг от друга и формировать множество конфигураций.
Каждое устройство робота-частицы имеет цилиндрическое основание с батареей, небольшим двигателем, датчиками, которые определяют интенсивность света, микроконтроллером и компонентом связи, который отправляет и принимает сигналы. Сверху установлена детская игрушка под названием «летающее кольцо Хобермана (Hoberman Flight Ring)», изобретатель которой является одним из соавторов статьи об исследовании. Она состоит из маленьких панелей, соединенных в круговую форму, которую можно тянуть, чтобы расширить и оттолкнуть обратно, чтобы сжать ее. Два маленьких магнита установлены на каждой панели.
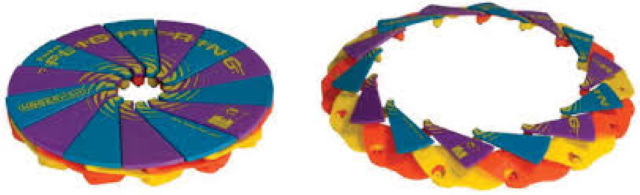
Расширение летающего кольца Хобермана. Фото: ResearchGate
Хитрость заключалась в том, чтобы запрограммировать частицы робота на расширение и сжатие в точной последовательности, чтобы подтолкнуть всю группу к движению к цели в виде источника света. Для этого исследователи оснастили каждую частицу алгоритмом, который анализирует передаваемую информацию об интенсивности света от каждой другой частицы, без необходимости прямой связи между частицами.
Датчики частицы определяют интенсивность света от источника света; чем ближе частица к источнику света, тем больше интенсивность. Каждая частица постоянно передает сигнал, который расшаривает воспринимаемый уровень интенсивности со всеми другими частицами. Скажем, роботизированная система частиц измеряет интенсивность света по шкале от 1 до 10: частицы, ближайшие к свету, регистрируют уровень 10, а самые дальние регистрируют уровень 1. Уровень интенсивности, в свою очередь, соответствует определенному времени, в течение которого частица должна расширяться. Частицы, испытывающие наивысшую интенсивность - уровень 10 - расширяются первыми. Когда эти частицы сжимаются, то затем расширяются следующие частицы в порядке - уровень 9. Это распределенное по времени расширение и сжатие происходит на каждом последующем уровне.
«Это создает механическую волну расширения-сжатия, скоординированное движение толкания и перетаскивания, которое перемещает большой кластер в сторону внешних факторов или наоборот в сторону от воздействия внешних факторов», - говорит один из исследователей. Ключевым компонентом, добавляет он, является точная синхронная временная коордтинация от синхронизированных часов между частицами, которая обеспечивает максимально эффективное движение: «Если вы испортите синхронизированные часы, система будет работать менее эффективно».
В видеороликах исследователи демонстрируют роботизированную систему частиц, состоящую из реальных частиц, движущихся и меняющих направления к разным лампочкам, когда те включаются, и пробивающихся сквозь пропасть между препятствиями. В своей статье исследователи также показывают, что моделируемые кластеры, содержащие до 10 000 частиц, поддерживают локомотивное движение с половинной скоростью даже при сбое до 20% единиц.
«Это немного похоже на общеизвестную Серую слизь (англ. grey goo)», - говорит Липсон, профессор машиностроения в школе инженерных и прикладных наук Колумбийского университета, ссылаясь на научно-фантастическую концепцию самовоспроизводящегося робота, содержащего миллиарды наноботов. «Ключевым новшеством здесь является то, что у вас есть новый тип робота, у которого нет централизованного управления, нет единой точки отказа, нет фиксированной формы, а его компоненты не имеют уникальной идентичности».
Серая слизь (англ. grey goo) — гипотетический сценарий конца света, связанный с успехами молекулярных нанотехнологий и предсказывающий, что неуправляемые самореплицирующиеся нанороботы поглотят всё доступное им вещество Земли, выполняя свою программу саморазмножения; или вещество биосферы — биомассу: данный сценарий известен под названием «экофагия».
Впервые самореплицирующиеся машины были описаны математиком Джоном фон Нейманом, и поэтому иногда называются машинами фон Неймана. Впервые термин «серая слизь» был применён в 1986 году пионером нанотехнологий Эриком Дрекслером в книге «Машины создания», где при описании подобного сценария Дрекслер предостерёг, что «Мы не можем позволить себе определённого рода аварии с реплицирующимися ассемблерами». В 2004 году Дрекслер сказал, что из-за разразившейся шумихи жалеет о том, что придумал этот термин.
Следующим шагом, добавляет Липсон, является миниатюризация компонентов для создания робота, состоящего из миллионов микроскопических частиц.
«Работа указывает на новое инновационное направление в модульной и распределенной робототехнике», - говорит Мак Швагер (Mac Schwager), доцент кафедры аэронавтики и космонавтики и директор лаборатории мульти-робототехнических систем Стэнфордского университета. «Авторы используют коллективы простых стохастических роботизированных ячеек и используют статистику коллектива для достижения глобального движения. Это имеет некоторое сходство с биологическими системами, в которых каждая клетка организма следует некоторому случайному процессу, в то время как общий эффект этой случайности низкого уровня приводит к предсказуемому поведению для всего организма. Надежда состоит в том, что такие коллективы роботов приведут к устойчивому и адаптируемому поведению, подобному устойчивости и адаптивности, которые мы видим в природе».
Источник: Massachusetts Institute of Technology (MIT)
Похожее видео

Light Bio — ваши первые светящиеся растения.
Интерактивный автомобильный дисплей с дополненной реальностью. Когда пассажиры замечают интересующий объект, визуальная информация отображается в режиме реального времени в соответствии с линией их взгляда. Пассажиры могут коснуться визуальной подсказки на экране, чтобы получить доступ к подробной информации. Систему можно настроить для различных видов транспорта и встроить в окна транспортных средств.

Сила в количестве! Гуманоидные роботы Fourier GR-1 добиваются успехов.

Гамамелис виргинский выбрасывает семена на высокой скорости, чтобы обеспечить их широкое распространение. Сверхзамедленное видео вылета семян из плодовой коробочки.